pid控制原理,pid控制工作原理
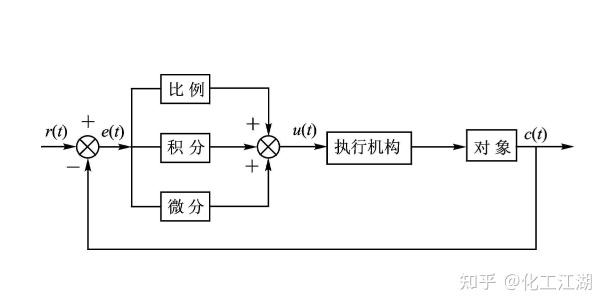
1、履带车PID控制算法的核心是建立位置式PID控制器pid控制原理,通过实时调节两侧电机转速差来实现直线行驶和转向控制pid控制原理,关键在于参数整定和抗积分饱和处理1 控制原理PID控制器通过比例P积分I微分D三项计算输出控制量对于履带车#x2022P项纠正当前姿态与目标值的偏差如航向角偏差#x2022I项累计历史偏差pid控制原理,消除静态误;一PID控制器原理PID控制器的核心是通过计算设定值与实际值的偏差 et ,结合比例积分微分三个环节的输出,生成最终控制量 ut ,其数学表达式为 ut = K_p cdot et + K_i int_0^t etau dtau + K_d fracdetdt 其中, K_p K_i。
2、通俗易懂PID解析 PID比例积分微分控制是一种在工业自动化和机器人控制等领域广泛使用的控制算法尽管PID算法听起来可能很复杂,但其核心原理其实相当直观且易于理解下面,我们就来通俗易懂地解析一下PID控制的三个关键参数Kp比例Kd微分和Ki积分一PID控制的基本原理 PID;PID,即Proportional比例Integral积分Derivative微分的缩写,是一种闭环控制算法它通过实时计算目标值与当前值的偏差,从比例积分微分三个角度进行智能调节,以达到快速且稳定的控制效果一PID的三个“脑回路”如何配合调节P比例控制现在原理偏差越大,输出越强优点响;PID控制是工业自动化领域中广泛应用的控制策略,其中P表示比例控制,I表示积分控制,D表示微分控制本文将从电容的特性出发,通过微分积分电路的本质来深入解析PID的控制原理一电容的本质 电容是装载电荷的容器,从微观角度看,当电荷流入容器时,随着时间的变化极间电场逐渐增大电容的电流超前电压相。
3、PID控制是一种通过比例积分和微分三个环节协同作用的控制算法,用于维持物理量的稳定以下是PID控制的通俗讲解1 比例控制 核心作用通过测量当前值与目标值的差距,调整调节力度 原理如果当前值低于目标值,就增加控制量如果当前值高于目标值,就减少控制量比例控制的速度和力度取决于P参数;PID在换热器显示中用于实时监控和精确控制温度,是确保工艺稳定性和能效优化的关键参数1 PID控制原理PID比例积分微分控制器通过计算实际温度与设定温度的偏差,动态调整换热器热媒流量或功率bull比例环节P根据当前偏差大小快速响应,减小瞬时误差bull积分环节I累计历史偏差,消除;模糊PID控制基本原理模糊PID通过模糊逻辑动态调整PID参数,核心步骤包括输入模糊化将误差e和误差变化率ec转化为模糊集如“大”“中”“小”模糊规则库基于专家经验建立“如果那么”规则,例如“若e大且ec小,则增大Kp减小Ki”模糊推理与清晰化根据规则生成模糊输出;1 神经网络PID控制器原理11 传统PID控制PID控制器通过比例P积分I微分D环节对误差进行调节,输出控制信号ut = K_p et + K_i int_0^t etaudtau + K_d fracdetdt其中, et 为设定值与反馈值的误差, K_p, K_i, K_d 为待;局限性对高度非线性时变或强耦合系统控制效果有限,需结合其他方法如神经网络遗传算法优化总结PID控制通过比例积分微分三部分的协同作用实现精确控制,但参数整定需结合系统特性反复调试理解其原理并灵活应用如针对噪声或非线性问题改进,是发挥PID性能的关键。
4、原理在保证基本PID控制规律的同时,改变微分作用项进入系统的位置,以减少对操作量的冲击类型包括IPDIPDIPDD2等控制算法,这些算法对偏差信号起到比例作用,而对被控变量起到微分作用同时,出现pid控制原理了完全微分PID和不完全微分PID及偏差滞后PID,以减少信号中高频干扰信号对操作量的冲击区段;PID原理形象解析+调试口诀PID原理形象解析PID,即比例Proportional积分Integral微分Derivative,是一种常见的控制算法,广泛应用于工业控制领域它通过结合三种不同的调节作用,实现对物理量的精确控制1 比例P作用 原理比例作用是最基本的控制作用它根据当前值与目标值之间的偏差;PID控制的基本原理是通过比例P积分I微分D三种控制作用的组合,对系统误差进行实时分析与调整,以实现精确的反馈控制 其核心在于三种控制作用的协同工作,具体原理如下比例控制P根据当前误差的大小直接调整输出,误差越大调整幅度越大例如手动调节阀门控制水位时,若当前水位与目标。
5、PID原理和调试口诀详解PID基本概述 PID是一个闭环控制算法,其核心在于通过反馈机制实现系统的精确控制要实现PID算法,硬件上必须具备闭环控制条件,即需要有一个能够测量系统状态的传感器,并将测量结果反馈到控制系统中以控制电机转速为例,就需要一个测量转速的传感器,将转速信息实时反馈给控制系统PID;PID原理形象解析+调试口诀PID原理形象解析 PID,即比例Proportional积分Integral微分Derivative控制,是一种在工业控制中广泛应用的调节器控制规律它通过结合这三种调节作用,实现对物理量的精确控制比例P控制作用根据当前值与目标值之间的偏差,按比例调整控制力度偏差越大,调整;一PID控制基础原理PID控制器通过设定值目标值与实际输出值反馈值的误差 et 计算控制量 ut ,其连续时间域公式为ut = K_p et + K_i int_0^t etaudtau + K_d fracdetdt其中 K_p K_i K_d 分别为比例积分微分系数,决定各。
6、深入解析PID控制原理,让我们从另一个角度来看待微分积分电路的本质PID控制中的P比例I积分与D微分部分,分别对应于控制逻辑中的实时反馈累积误差与预测未来变化,它们的核心在于理解电容与电感等基本电路元件的行为深入理解电容,我们得知电容具有储存电荷的能力,而且电荷的积累过程与。





